Find the points on a plane that are intersected by an object
Source:R/geometry.R
intersect_plane.Rdintersect_plane.neuron finds the place where a neuron intersection
intersect_plane(x, plane, ...)
# S3 method for default
intersect_plane(x, plane, ...)
# S3 method for neuron
intersect_plane(x, plane, closestpoint = NULL, ...)Arguments
- x
A neuron, set of line segments or other data - see details.
- plane
A plane, specified by the 4 coefficients of the plane equation (see
plane_coefficients)- ...
Additional arguments passed to methods
- closestpoint
Used to define the closest hit when there are multiple
Value
A Nx3 matrix of the X,Y,Z positions of the intersections (NA when there is no intersection)
See also
Other geometry:
plane_coefficients()
Examples
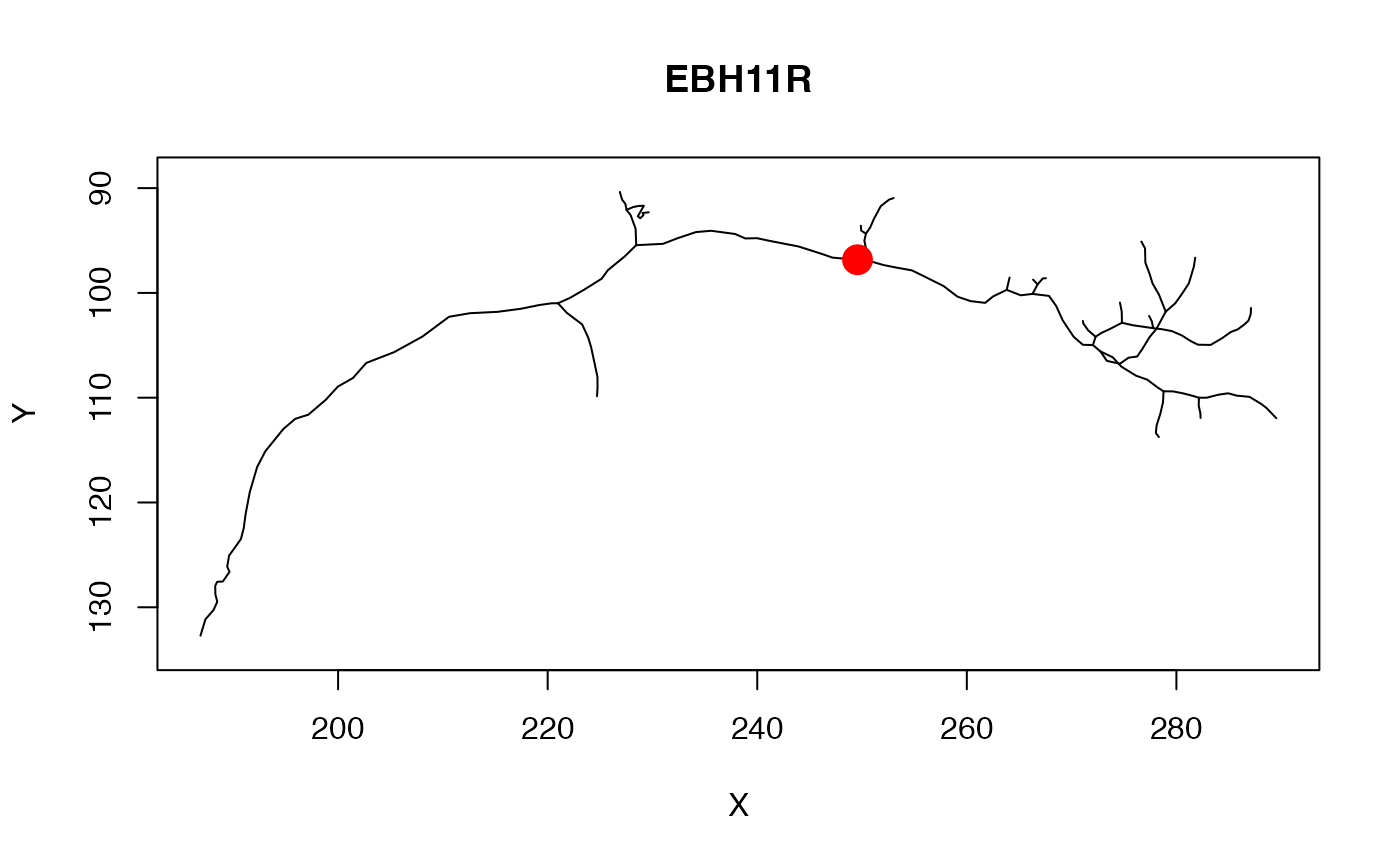
## Find plane coefficients
# point on plane
cent=c(250.4987, 95.73561, 140.2052)
# vector normal to plane
vec=c(0.7709581, 0.03417276, -0.411977)
plc=plane_coefficients(cent, vec)
## intersect with plane
ip=intersect_plane(Cell07PNs[[1]], plc)
plot(Cell07PNs[[1]], WithNodes=FALSE)
points(ip[1], ip[2], pch=19, cex=2, col='red')
 if (FALSE) {
plot3d(Cell07PNs[[1]], col='grey', WithNodes=FALSE)
spheres3d(matrix(ip, ncol=3), col='red', rad=2)
planes3d(plc[,1:3], d=plc[,'d'])
}
if (FALSE) {
plot3d(Cell07PNs[[1]], col='grey', WithNodes=FALSE)
spheres3d(matrix(ip, ncol=3), col='red', rad=2)
planes3d(plc[,1:3], d=plc[,'d'])
}